“More than twenty people applied to the summer school, which offers basic simulation training,” Dr. Alán Alpár, Vice-Rector for International Studies said, adding that the six fortunate medical students were selected on the basis of their CVs. “In the evaluation, the student’s scientific, demonstrative and clinical activities were given priority in the objective scoring system. The majority of applicants were 5th- or 6th-year students,” he emphasized.
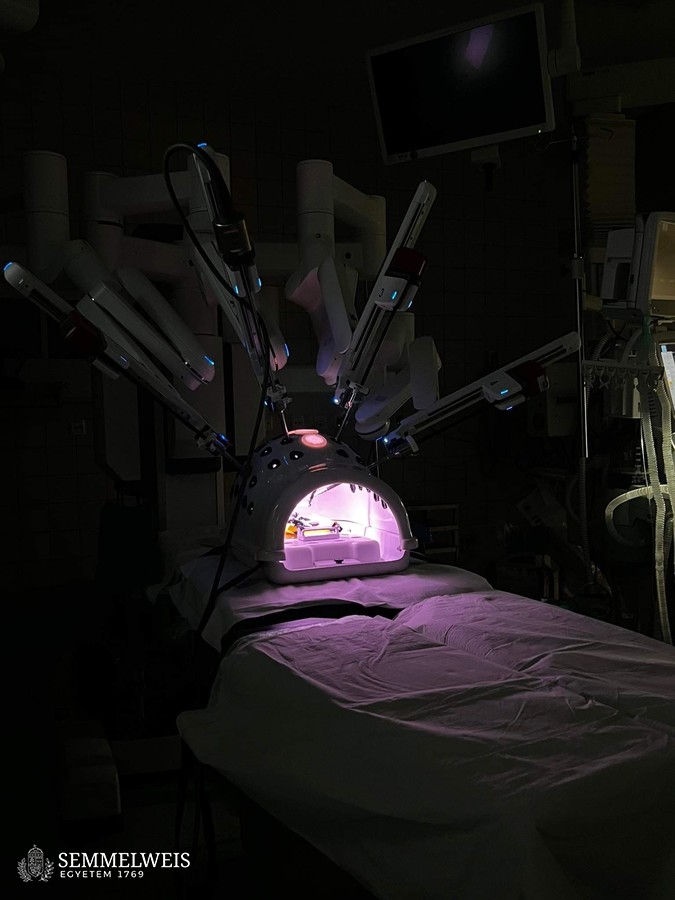
“Semmelweis University is one of Europe’s leading English and German-language medical training institutions, with its first outsourced training programme having started in Hamburg in 2008. In Germany, more than 50 graduating students received their Semmelweis diplomas last academic year. As an off-campus training centre of the University, ACH is part of the Faculty of Medicine. The cooperation between the two institutions is harmonious. One example of this is the English-language, practice-oriented basic training in robotic surgery that took place at the end of the summer. The success of the training initiated by ACH also lay in the fact that access to the world’s most advanced da Vinci tool was an exceptional opportunity for the students,” Dr. Alán Alpár told our website.

“The students had to master a specific set of tasks, in which they practiced the basic robot surgery steps and techniques one by one, from handling the camera to operating three or four robot arms. It is very important that the students were able to assess their knowledge and interest in minimally invasive surgical techniques: whether or not they would like to do this in the future. This is a very important selection point, because it looks simple from the outside, but it is only when you use it that you find out whether you have the ability to actually build and use the elements of the movement you have learned. Students also need to see whether their existing skills can be developed and whether they are capable of easily mastering the technique,” – said Dr. Attila Szijártó, Director of the Department of Surgery, Transplantation and Gastroenterology. He stressed that those ten days were a special occasion, as in Hamburg there is already a university, undergraduate course in which robotic surgery is an elective, but so far at a practical level, robotic surgery training is not an integrated part of the undergraduate course. During the training in Budapest, students receive theoretical knowledge about it, fourth-year students are shown the robots, but they cannot try them out in practice. But now in Hamburg, the students in the programme have been able to do just that.

Johanna Gorkisch found out about the opportunity through Neptun this July and was motivated to apply by numerous reasons. She first encountered the daVinci robot at an oncology block and was already impressed by the device. Before the trip to Hamburg, the 5th-year student of the university’s German-language course was looking forward to gaining insights into various robot-assisted surgeries and spending time practicing with the da Vinci robot. As she said, both her expectations have been fully met. Participants of the training were able to see surgery with the daVinci robot in several specialties. “After the training on the specific activity, we were also able to assist, for example, in placing the robot unit on the patient and connecting and replacing the various equipments. We were also able to follow the surgery in 3D with the second da Vinci robotic console. The doctors explained a lot to us and we were always able to ask questions,” the student from the Faculty of General Medicine said. The highly practical training was based on theoretical teaching. “It was also interesting to learn about the current practical limitations of the da Vinci robot, which we discussed in the lectures at the beginning of the week,” she added.

Gallery




Report by Johanna Gorkisch
After a brief introduction, the program started with a presentation on robotic surgery. The chief surgeons and senior physicians of each department explained the clinical pathologies for which robot-assisted surgery is particularly beneficial. We were taught the basic controls of the da Vinci simulator at the Asklepios Clinic in Barmbek.
On the first day, we were divided into small teams at the Asklepios Barmbek and Altona clinics. During the day, we participated in and assisted in various surgeries (e.g. esophagectomy, prostatectomy, hysterectomy).
In the “da Vinci surgery”, all operations were usually finished by 4 pm, when the second part of the day started for us: that was the practical training on the da Vinci device. We were given an exercise plan which consisted of 8 exercises, each consisting of 10 rounds. These had to be performed on the simulation trainer. There were exercises on the correct handling of the instruments, camera movements, followed by knotting and suturing exercises. The robot has to be handled with the whole body, and the hands and feet also play a role in the correct handling of the instruments and the camera. It was exciting to see how fast you could move with the da Vinci. The exercises, which took a few minutes at first, could be done faster and more accurately in subsequent attempts. It was very good to be there, we often stayed late into the evening to complete all the exercises.
At the end of the week, we took the next step and connected the robotics unit. With the help of the pelvitrainer, we were now able to develop the feel for the actual handling of the robot. The knots and nets were easy to sew on thanks to the training we had received earlier. This exercise was important to familiarize ourselves with the materials. How much load can I apply to the different threads when tying a knot? How accurately do the scissors cut? How long does it take to change an artificial arm? So, the program ended with the completion of this training. Overall, we had plenty of time to develop a good basis for controlling the da Vinci robot.
Read our previous article about the training here.
Ágnes Barta, Rita Kónya
Photo: Bálint Barta/Attila Kovács – Semmelweis University, Johanna Gorkisch