 Mehr als zwanzig Personen meldeten sich für die Sommerschule an, die eine grundlegende Simulationsausbildung bot, sagte Dr. Alán Alpár. Zum Auswahlverfahren sagte der Vizerektor für internationale Ausbildung, dass die sechs MedizinstudentInnen, die für die theoretische und praktische Ausbildung bei ACH nach Hamburg reisten, auf der Grundlage ihrer Lebensläufe ausgewählt wurden. Bei der Bewertung wurden die wissenschaftlichen, Demonstrations- und klinischen Aktivitäten der StudentInnen berücksichtigt. Die meisten BewerberInnen waren StudentInnen des fünften oder sechsten Studienjahres, fügte der Vizerektor hinzu.
Mehr als zwanzig Personen meldeten sich für die Sommerschule an, die eine grundlegende Simulationsausbildung bot, sagte Dr. Alán Alpár. Zum Auswahlverfahren sagte der Vizerektor für internationale Ausbildung, dass die sechs MedizinstudentInnen, die für die theoretische und praktische Ausbildung bei ACH nach Hamburg reisten, auf der Grundlage ihrer Lebensläufe ausgewählt wurden. Bei der Bewertung wurden die wissenschaftlichen, Demonstrations- und klinischen Aktivitäten der StudentInnen berücksichtigt. Die meisten BewerberInnen waren StudentInnen des fünften oder sechsten Studienjahres, fügte der Vizerektor hinzu.
Die Semmelweis Universität ist eine der führenden englischsprachigen und deutschsprachigen Ausbildungsinstitute in Europa. Der erste außeruniversitäre Lehrgang der Semmelweis Universität wurde 2008 ins Leben gerufen. In Deutschland erhielten im letzten Studienjahr mehr als 50 AbsolventInnen ihr Semmelweis-Diplom. Als externe Ausbildungsstätte der Universität ist ACH Teil der Medizinischen Fakultät. Die Zusammenarbeit zwischen den beiden Institutionen ist harmonisch – ein Beispiel dafür ist dieser englischsprachige, praxisorientierte Grundkurs für Roboterchirurgie, der Ende des Sommers durchgeführt wurde.
Der Erfolg der von ACH ins Leben gerufenen Ausbildung lag auch darin, dass der Zugang zum weltweit modernsten Da Vinci-Gerät eine außergewöhnliche Möglichkeit für die StudentInnen bedeutete, betonte Dr. Alán Alpár.
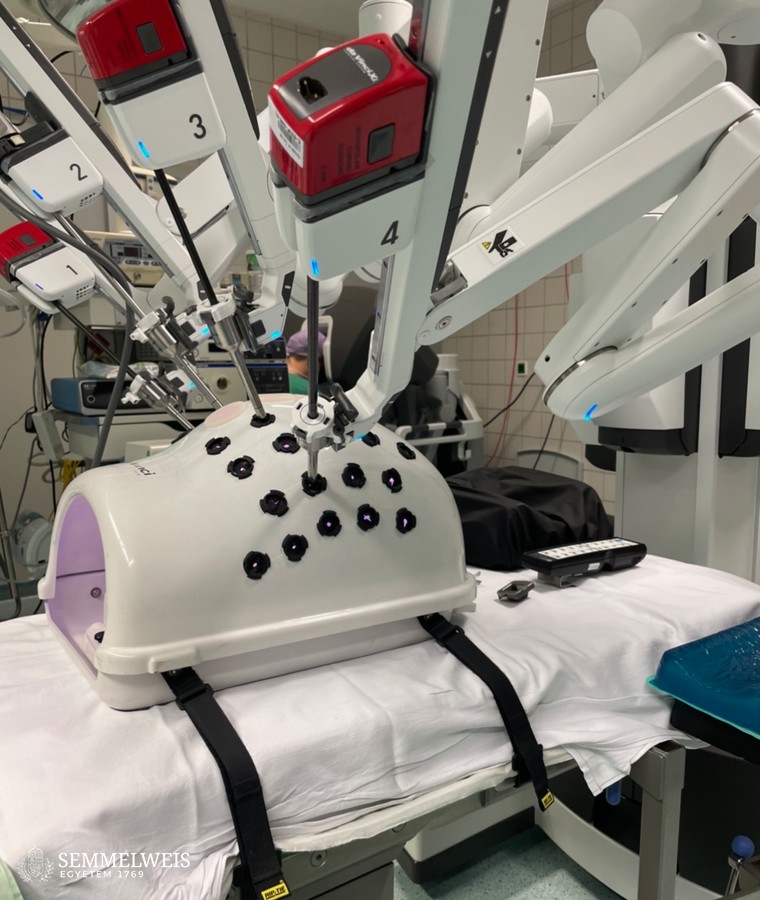
 „Die StudentInnen mussten eine Reihe spezifischer Aufgaben erlernen, bei denen sie Elemente grundlegender roboterchirurgischer Verfahren und Techniken übten, von der Handhabung der Kamera bis zur Bedienung von drei oder vier Roboterarmen. Es ist sehr wichtig, dass die StudentInnen ihr Wissen und ihr Interesse an minimalinvasiven chirurgischen Techniken überprüfen konnten: ob sie dies in Zukunft gerne tun würden oder nicht. Dies ist ein sehr wichtiger Auswahlpunkt, denn von außen sieht es einfach aus, aber in der praktischen Anwendung zeigt sich erst, ob man die erlernten Bewegungselemente tatsächlich anwenden kann. Die StudentInnen müssen auch wissen, ob ihre vorhandenen Fähigkeiten entwickelt werden können, bzw. ob sie in der Lage sind, die Technik leicht zu erlernen. – sagte Dr. Attila Szijártó, Direktor der Klinik für Chirurgie, Transplantation und Gastroenterologie. Er betonte, dass die Sommeruniversität eine besondere Gelegenheit war, da es in Hamburg bereits einen Studiengang gibt, in dem die Roboterchirurgie ein Wahlfach ist, die Ausbildung in der Roboterchirurgie aber bisher kein integrierter Bestandteil des Studiums auf praktischer Ebene ist. In Budapest wird den StudentInnen theoretisches Wissen darüber vermittelt, und den StudentInnen im vierten Studienjahr werden die Roboter gezeigt, aber sie können sie nicht in der Praxis selbst ausprobieren. In Hamburg hatten die Studenten, die an dem Programm teilnahmen, nun die Gelegenheit, den Roboter in der Praxis auszuprobieren.
„Die StudentInnen mussten eine Reihe spezifischer Aufgaben erlernen, bei denen sie Elemente grundlegender roboterchirurgischer Verfahren und Techniken übten, von der Handhabung der Kamera bis zur Bedienung von drei oder vier Roboterarmen. Es ist sehr wichtig, dass die StudentInnen ihr Wissen und ihr Interesse an minimalinvasiven chirurgischen Techniken überprüfen konnten: ob sie dies in Zukunft gerne tun würden oder nicht. Dies ist ein sehr wichtiger Auswahlpunkt, denn von außen sieht es einfach aus, aber in der praktischen Anwendung zeigt sich erst, ob man die erlernten Bewegungselemente tatsächlich anwenden kann. Die StudentInnen müssen auch wissen, ob ihre vorhandenen Fähigkeiten entwickelt werden können, bzw. ob sie in der Lage sind, die Technik leicht zu erlernen. – sagte Dr. Attila Szijártó, Direktor der Klinik für Chirurgie, Transplantation und Gastroenterologie. Er betonte, dass die Sommeruniversität eine besondere Gelegenheit war, da es in Hamburg bereits einen Studiengang gibt, in dem die Roboterchirurgie ein Wahlfach ist, die Ausbildung in der Roboterchirurgie aber bisher kein integrierter Bestandteil des Studiums auf praktischer Ebene ist. In Budapest wird den StudentInnen theoretisches Wissen darüber vermittelt, und den StudentInnen im vierten Studienjahr werden die Roboter gezeigt, aber sie können sie nicht in der Praxis selbst ausprobieren. In Hamburg hatten die Studenten, die an dem Programm teilnahmen, nun die Gelegenheit, den Roboter in der Praxis auszuprobieren.
 Johanna Gorkisch erfuhr im Juli dieses Jahres durch Neptun von dieser Möglichkeit, aufgrund verschiedener Erfahrungen entschied sie sich zu bewerben, sie war sehr begeistert. Während des Onkologie-Blockes hatte sie zum ersten Mal die Möglichkeit, einen kurzen Blick auf den DaVinci Roboter zu werfen, der sie sehr beeindruckte. Johanna studiert im deutschsprachigen Studiengang der Universität, und ist Studentin des fünften Studienjahres. Ihre Erwartungen umfassten, dass sie einen guten Einblick in die unterschiedlichen roboterassistierten Operationen bekommen, und viel Zeit mit dem DaVinci-Roboter üben würden. Wie sie sagte, wurden ihre beiden Erwartungen voll erfüllt. Die Teilnehmer konnten Operationen mit dem DaVinci-Roboter in verschiedenen Fachbereichen beobachten. „Wir durften auch (nach Einweisung in die jeweilige Tätigkeit) assistieren (z.B. beim Anlegen der Robotikeinheit an den Patienten, sowie im Anschließen und Wechsel der verschiedenen Instrumente). Außerdem konnte man mit der zweiten DaVinci Roboter Konsole die Operation in 3D verfolgen. Die Ärzte haben uns dabei viel erklärt und man konnte jederzeit Fragen stellen – betonte die Studentin der Medizinischen Fakultät. Das äußerst praktische Training basierte auf einer theoretischen Ausbildung. „Interessant waren aber auch derzeitige Grenzen des DaVinci Roboters in der Praxis kennen zu lernen, welche wir in den Vorträgen am Start der Woche besprochen hatten – fügte sie hinzu.
Johanna Gorkisch erfuhr im Juli dieses Jahres durch Neptun von dieser Möglichkeit, aufgrund verschiedener Erfahrungen entschied sie sich zu bewerben, sie war sehr begeistert. Während des Onkologie-Blockes hatte sie zum ersten Mal die Möglichkeit, einen kurzen Blick auf den DaVinci Roboter zu werfen, der sie sehr beeindruckte. Johanna studiert im deutschsprachigen Studiengang der Universität, und ist Studentin des fünften Studienjahres. Ihre Erwartungen umfassten, dass sie einen guten Einblick in die unterschiedlichen roboterassistierten Operationen bekommen, und viel Zeit mit dem DaVinci-Roboter üben würden. Wie sie sagte, wurden ihre beiden Erwartungen voll erfüllt. Die Teilnehmer konnten Operationen mit dem DaVinci-Roboter in verschiedenen Fachbereichen beobachten. „Wir durften auch (nach Einweisung in die jeweilige Tätigkeit) assistieren (z.B. beim Anlegen der Robotikeinheit an den Patienten, sowie im Anschließen und Wechsel der verschiedenen Instrumente). Außerdem konnte man mit der zweiten DaVinci Roboter Konsole die Operation in 3D verfolgen. Die Ärzte haben uns dabei viel erklärt und man konnte jederzeit Fragen stellen – betonte die Studentin der Medizinischen Fakultät. Das äußerst praktische Training basierte auf einer theoretischen Ausbildung. „Interessant waren aber auch derzeitige Grenzen des DaVinci Roboters in der Praxis kennen zu lernen, welche wir in den Vorträgen am Start der Woche besprochen hatten – fügte sie hinzu.

Galerie




Bericht von Johanna Gorkisch
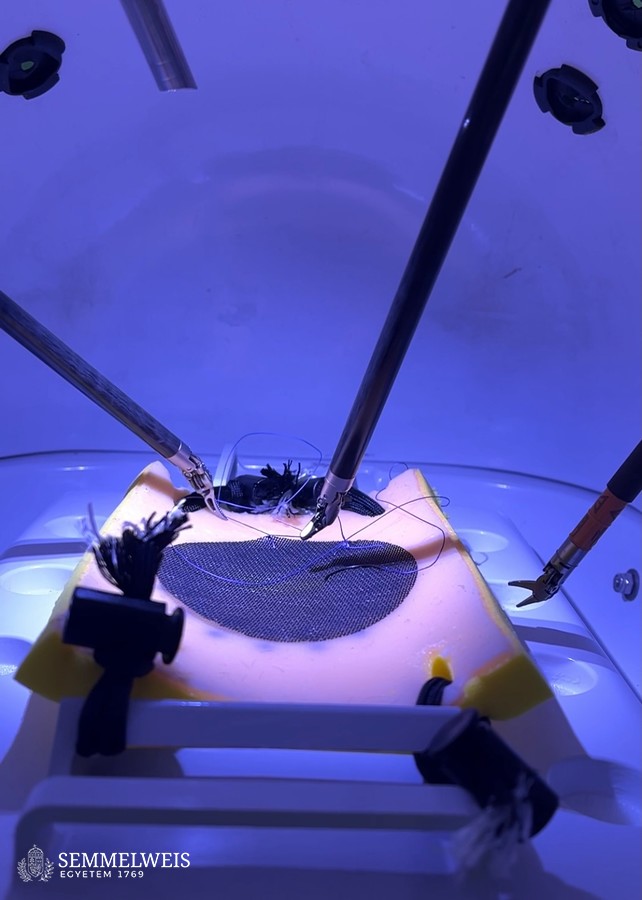
Nach einer kurzen Vorstellungsrunde startete das Programm mit einer Einführung in die Roboterchirurgie. Die Chef- und Oberärzte der einzelnen Fachrichtungen klärten uns über die Krankheitsbilder auf, bei denen die roboterassistierten Operationen besonders von Vorteil sind. Wir fuhren ins Asklepios Krankenhaus Barmbek und erhielten eine Einweisung in die grundsätzliche Steuerung des DaVinci Simulators. Am ersten Tag wurden wir in kleinen Teams auf die Krankenhäuser Asklepios Klinik Barmbek und Altona aufgeteilt. Tagsüber nahmen wir an den verschiedenen Operationen teil (z.B. Ösophagusresektionen, Prostatektomien und Hysterektomien) und durften auch assistieren. In der Regel waren sämtliche Operationen im „DaVinci-Raum“ um 16 Uhr beendet. Dies war unser Startsignal, denn dann begann für uns der zweite Teil des Tages – das „Hands-on-Training“ am DaVinci. Wir bekamen einen Übungsplan mit 8 Aufgaben je 10 Runden, die am Simulationstrainer absolviert werden sollten. Es waren Übungen zur richtigen Instrumentenhandhabung, Kameraführungen, gefolgt von Knoten und Nahtübungen. Man bedient den Roboter mit dem gesamten Körper. Sowohl das Feingefühl in den Händen als auch in den Füßen ist gefragt, damit Instrumente, als auch die Kamera präzise bedient werden können. Es war spannend zu sehen, wie schnell man sich doch Fortschritte am DaVinci erarbeiten konnte. Übungen, für die man zunächst einige Minuten brauchte, konnten in den darauffolgenden Versuchen immer schneller und präziser absolviert werden. Es hat viel Spaß gemacht und wir blieben oft bis in den späten Abend, um auch alle Übungen beenden zu können. Zum Ende der Woche folgte nun der nächste Schritt – die Kopplung der Robotikeinheit. Mithilfe eines „pelvic trainers“ konnten wir nun ein Gefühl für das „echte“ Handling des Roboters entwickeln. Knoten und auch Netze anzunähen waren durch das vorherige Training sehr gut machbar. Diese Übung war wichtig, um sich mit den Materialen vertraut zu machen – wie stark kann ich die unterschiedlichen Fäden beim Knotenknüpfen belasten? Wie präzise schneidet die Schere? Wie lange dauert das Wechseln eines Instrumentenarmes? Mit Abschluss des Trainings am „pelvic trainer“ wurde das Programm beendet. Wir hatten viel Zeit, um uns eine gute Grundlage für die Steuerung des DaVinci Roboters zu erarbeiten.
Unser früherer Artikel zu diesem Thema ist hier zu lesen.
Ágnes Barta, Rita Kónya
Übersetzung: Ágnes Barta
Foto: Bálint Barta, Attila Kovács – Semmelweis Universität